4.2.1. Explicit time integration basics¶
This demo is part of Spitfire, with licensing and copyright info here.
Highlights
the basics of time integration with Spitfire
4.2.1.1. Introduction¶
This notebook demonstrates the use of Spitfire’s time integration
framework, notably its default solver and the use of explicit
Runge-Kutta methods. We also compare to the use of
scipy.integrate.odeint, another convenient ODE solver.
In this first example we solve a simple ordinary differential equation,
subject to initial condition \(y(0) = y_0\) with real coefficient \(k>0\). This has the exact solution, \(y(t)=y_0 \exp(-kt)\). This is a simple differential equation but is the fundamental building block of more complicated systems.
4.2.1.2. Solving with Spitfire’s odesolve and SciPy’s integrate.odeint¶
First we use odesolve, a Spitfire method that drives all the various
types of time integration in Spitfire, from the simple Forward Euler
method to adaptive time-stepping with high-order implicit Runge-Kutta
methods. This method may be used with default settings for many
small-scale ODE systems like the above exponential decay or ecology
models and simple chemistry models.
import numpy as np
import matplotlib.pyplot as plt
from spitfire import odesolve
Next we set up some of the problem details, like the time step,
\(k\) value, final time, and initial condition \(y_0\), which
you’ll note is made as a NumPy array.
Here we also make a function that computes the right-hand side of the
differential equation given the current time and solution value,
respectively, as inputs. Any callable object - something that has a
() operator that takes two arguments, namely the time and the
solution state - can be used as the right-hand side operator.
dt = 0.02
tf = 1.0
k = -10.
y0 = np.array([1.])
rhs = lambda t, y: k * y
Now to use Spitfire’s default solver and obtain the solution at the
specified set of times (possibly doing many more time steps of variable
size behind the scenes, we use the following call to odesolve:
output_times = np.linspace(0., tf, 21)
y_default = odesolve(rhs, y0, output_times)
By comparison, see the use of SciPy’s integrate.odeint method below.
Note that SciPy takes the opposite convention that the state vector
comes before the solution time in the arguments to the right-hand side
function. The lambda function below simply switches the argument
ordering for SciPy.
from scipy import integrate as scipy_integrate
rhs_for_scipy = lambda x, t: rhs(t, x)
y_scipy = scipy_integrate.odeint(rhs_for_scipy, y0, output_times)
4.2.1.3. Using Forward Euler and RK4 in odesolve¶
Now we show how to use Spitfire to use some explicit Runge-Kutta methods
it provides for you. Other methods are provided as well, and in
following demonstrations we will show how to write your own methods for
use with odesolve.
ForwardEulerS1P1: the simplest time-stepping method of allRK4ClassicalS4P4: the Runge Kutta method, a four-stage, fourth-order method
Note below that two changes are needed to run the explicit methods.
We provide the
methodkeyword argument toodesolve. Carefully note that we are constructing an instance due to the parentheses afterForwardEulerS1P1.With these methods we have to tell Spitfire how large the time step is. The default method uses advanced adaptive time-stepping approaches, while here we simply use a constant time step by providing a number to the
step_sizekeyword argument.
from spitfire import ForwardEulerS1P1, RK4ClassicalS4P4
y_fe = odesolve(rhs, y0, output_times, step_size=dt, method=ForwardEulerS1P1())
y_rk = odesolve(rhs, y0, output_times, step_size=dt, method=RK4ClassicalS4P4())
We show one more example in this demonstration. Below we use
odesolve with the save_each_step argument instead of providing
an array of output times as above. When this is used, the time and state
vector at every time step taken under the hood of odesolve are
returned. This can be more generally useful when a good array of
output_times is unclear. Note that it can also generate a lot of
data for long-running simulations.
Another key difference is that without output_times it’s not
specified how the simulation should actually terminate. So, we add the
stop_at_time argument to integrate only until the final time is
reached. Other stopping criteria will be introduced in later
demonstrations - as will the ability to write your own entirely
customized stopping criteria.
t_fe_full, y_fe_full = odesolve(rhs, y0, stop_at_time=tf, save_each_step=True, step_size=dt, method=ForwardEulerS1P1())
t_rk_full, y_rk_full = odesolve(rhs, y0, stop_at_time=tf, save_each_step=True, step_size=dt, method=RK4ClassicalS4P4())
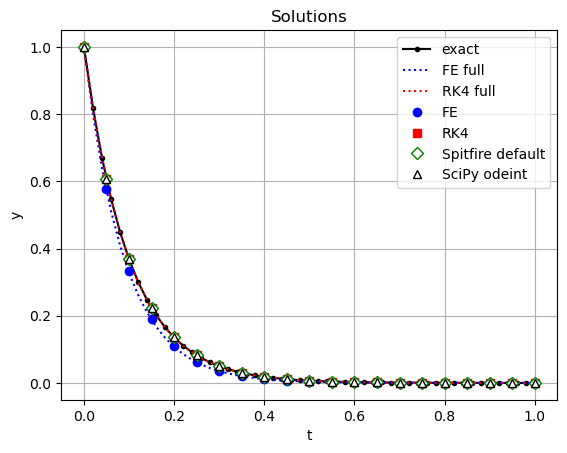
Plotting the results shows that the Forward Euler method, as is
expected, is quite inaccurate compared to the other methods. The default
integrators in Spitfire and Scipy both yield excellent solutions to this
problem. To see in more detail you can zoom in on the plot, thanks to
the %matplotlib notebook magic.
y_exact = y0 * np.exp(k * t_fe_full)
plt.plot(t_fe_full, y_exact, 'k.-', label='exact')
plt.plot(t_fe_full, y_fe_full, 'b:', label='FE full')
plt.plot(t_rk_full, y_rk_full, 'r:', label='RK4 full')
plt.plot(output_times, y_fe, 'bo', label='FE')
plt.plot(output_times, y_rk, 'rs', label='RK4')
plt.plot(output_times, y_default, 'gD', markerfacecolor='w', label='Spitfire default')
plt.plot(output_times, y_scipy, 'k^', markerfacecolor='w', label='SciPy odeint')
plt.title('Solutions')
plt.xlabel('t')
plt.ylabel('y')
plt.legend(loc='best')
plt.grid()
plt.show()
4.2.1.4. Conclusions¶
In this example we’ve shown how to use two common time-stepping schemes
with Spitfire to solve a simple ordinary differential equation. We’ve
covered how to use the odesolve method to drive the time-stepping
loop and save data at particular solution times. This can be quite
similar to other ODE solvers, such as those in Matlab or SciPy’s
integrate.odeint method. While odesolve provides a convenient
interface for simple ODEs like this, it allows a great deal of
extensibility and fine-grained control over the use of advanced
steppers, linear and nonlinear solvers, step controllers, data output,
and more. This enables odesolve to efficiently solve much more
complicated ODE/PDE problems where default solver choices can be
infeasibly slow.